What's this
discoverySimulator is a Python package allowing to simulate environments in which mobile robots evolve. This simulator is accompanied by an interface allowing to visualize and control the simulation. This package is ideal for a playful learning of python and a discovery of mobile robotics.
Documentation
The documentation associated with this python package can be found here.
Installation
Use the package manager pip to install the package discoverySimulator:
Usage example
Code
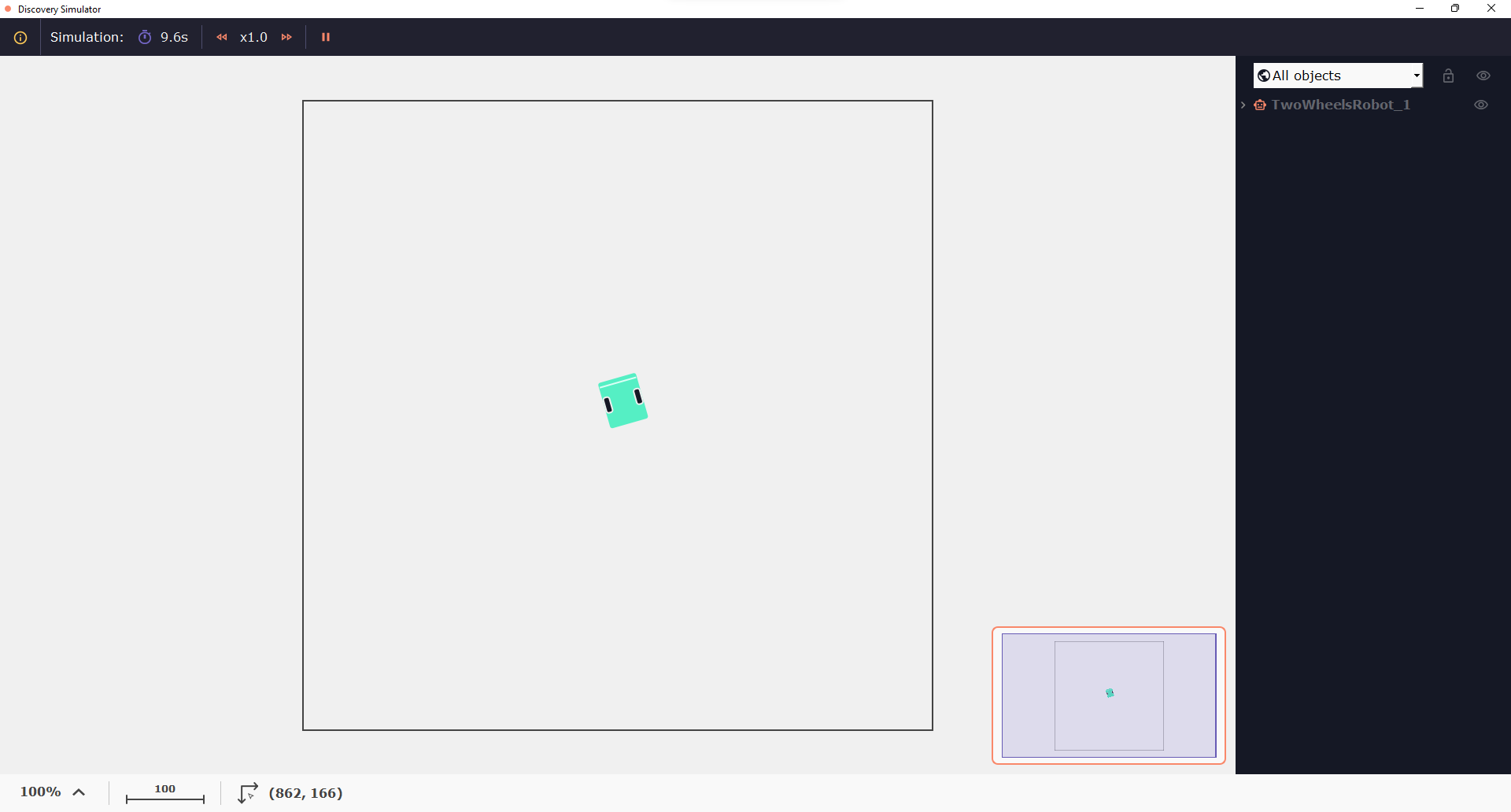
Code result
Example codes
The simulator is accompanied by several example codes in the examples module. These codes can be run as follows:
Help and bug reports
General questions and comments can be sent to the following email address: discoverysimulator@gmail.com.
You can also report bugs at this same email address.
How to contribute
We are open to contributions, so send us your ideas or code amendments to the following email address: discoverysimulator@gmail.com, and we will do our best to accommodate you!
Credits
Copyright (c) 2022, Leo Planquette & Eloise Lefebvre.
License
discoverySimulator is released under the GPL v3 license and under a commercial license that allows for the development of proprietary applications.
Additional details about this license can be found here.